Design and development of a controlling unit and gripping claw for BSJX1 ROV
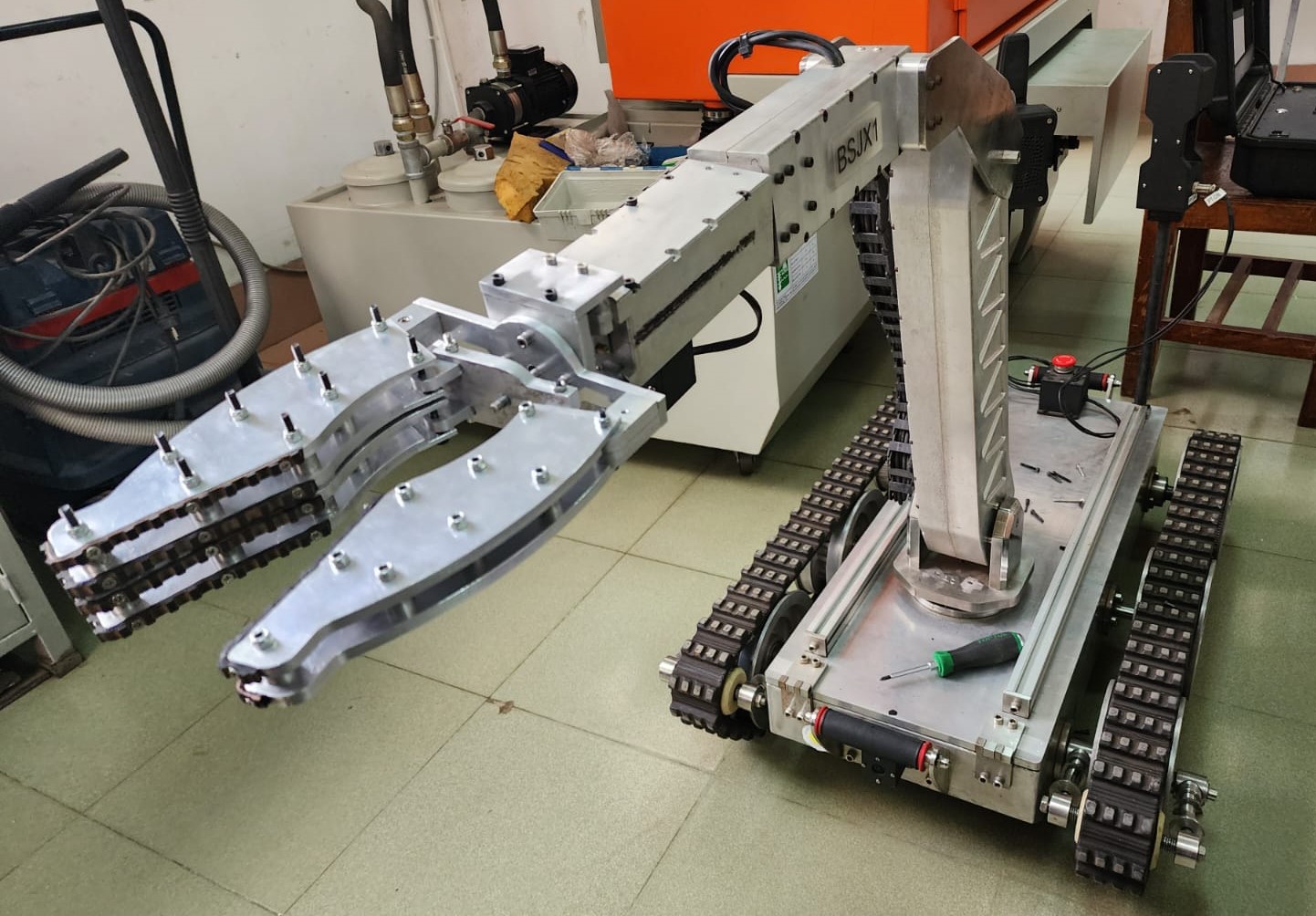
Pick-and-place robots are some of the most commonly used automation machines in various fields. Such robots can lift a workpiece from one location to a target location at an efficient pace, without fatigue. Hence, assigning humans to such tasks can be dangerous for moving explosive and unknown objects. The precise pick-and-place operation needs a particular motion of gripping claw for the robotic arm as well as smooth controlling firmware.